| This capability is implemented in CT-2
controllers with version 2.1 or later firmware. This pulse is called
an index pulse, or Z-pulse (for Zero Pulse), or sometimes a Z-index. Since the
board was not originally designed for this, it is accomplished by using
the RJ11 input jack that is normally used for absolute encoders.
Thus one cannot use absolute and z-index incremental encoders together.
An add-on board is available to handle converting the index pulse
from TTL to RS485 levels at the encoder. This is designated on our
Products page as the LS485-IDX. For
wiring, and connection details see the links below. Our initial effort to provide index
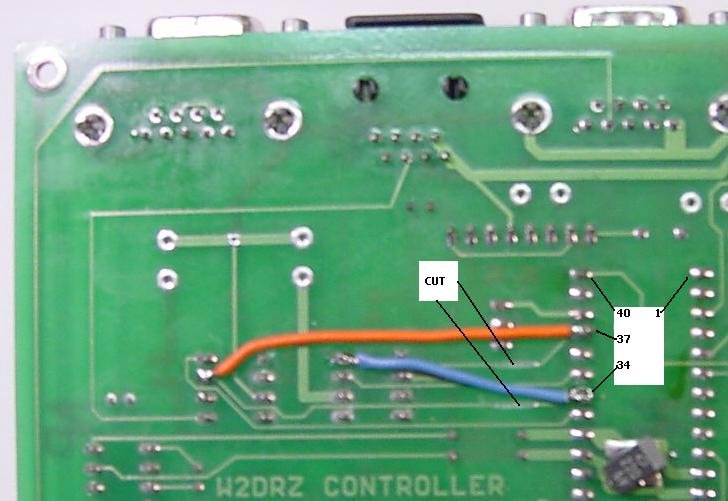
pulse detection did work for many encoders, but we soon discovered that
there could be problems with some models, or when the encoders were
mounted such as to provide reverse rotation from normal. A change
in software with a corresponding board modification cured that problem,
see CT-2 Modifications for use with Index Pulse.
The CT-2 has been used with the following
manufacturer's incremental encoders
| US-Digital |
S5 and T5 Series - Note 1 |
| BEI |
H25D Series - Note 2 |
| Heidenhain |
Note 1 |
| Dynapar |
Note 2 |
Note 1: The US Digital and Heidenhain encoders all produce a
very short pulse each time the encoder shaft passes the zero point.
To work with these encoders, the jumpers at Pad1-Pad2 (for Azimuth), or
at Pad3-Pad4 (for Elevation) must be removed. Also see notes in
the Reverse Gearing section, below.
Note2: The BEI and Dynapar encoders and some others produce a
long pulse each time the encoder passes the zero point. For these
encoders the jumpers at Pad1-Pad2 and at Pad3-Pad4 must be connected.
Also see notes in the Reverse Gearing section, below. |