| Incremental encoders are enough different than others so somewhat
different calibration routines are needed. Incremental encoders emit
pulses in a quadrature format that are used by the controller for
counting and for directional information. DrzTrack handless 2
different classes of incremental encoders. 1. Encoders that have index
pulse capability (and you intend to use the index pulses), encoders that
are not geared 1:1 with the antenna movement, and encoders for which you
do not know the number of pulses per revolution. These encoders
are set to encoder type "Incremental", in the DrzTrack configuration
window.
2. Encoders that are geared 1:1 with antenna rotation, do not have
(or you do not wish to use) index pulses, and for which you do know the
number of pulses per revolution. These encoders are set to encoder
type "Incremental 360", in the DrzTrack configuration.
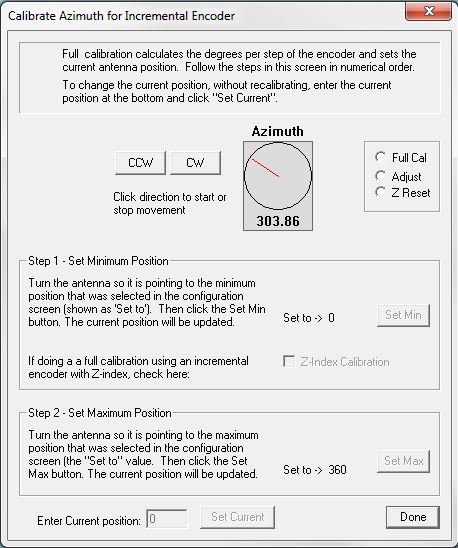
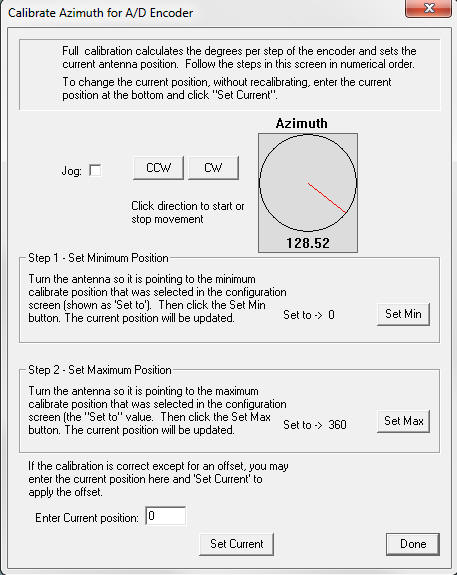
For type 1, full calibration always
requires that the min position be set first, so in the dialog shown
below, the 'Set Max' button is disabled until after a 'Set Min' has been
done (see the calibrate description above for more details on how 'Set
Min' and 'Set Max' work. Also the 'Enter Current Position' field
and the 'Set Current' button are disabled unless 'Adjust' or 'Z Reset'
is selected at the top.
'Enter Current position' works much the same as for the other
encoders, see above.
 Some incremental encoders have an output line to provide an
index, or 'Zero
Pulse'. This is a short data pulse that occurs once per
revolution, when the encoder passes the zero position. This is
extremely useful because the controller calibration can automatically be
corrected whenever a Z-Index pulse is detected. So if a windstorm
has turned your antenna while the controller was off and unable to
detect the count change, all you have to do is rotate the antenna past
the Z-Index and the calibration will automatically be corrected.
Now consider the case where the antenna and the encoder are geared 1
to 1, a full antenna rotation of 360 degrees also turns the encoder 360
degrees. In that case the encoder will only pass the Z-Index once.
During full calibration, the controller has detected the Z Pulse
and saved the count at that point as the Z-Index position. So when
the Z-Pulse is detected again the controller calibration is adjusted
back to that same count. However a 1 to 1 gearing can be hard to
do, and additionally it is possible to get more accuracy of position by
'gearing up' the encoder, turning it several times or more for a full
rotation of the antenna. When this is done, multiple Z-Pulses
will be detected during the full rotation. At each Z-Pulse detected
during calibration, the controller stores the current position in a
table that can hold up to 16 positions. Thus the maximum gearing up
the controller can handle is 16 to 1. In this situation, there is
one problem. When the encoder passes a Z-Index point, how does it
know which stored count to use. The answer is that it uses the one
that is closest to the current count. So what do you do
if the antenna has moved enough so that the current count is close to
the wrong Z-Index? The answer is shown in the dialog above.
Select Z-Reset at the top and then set the antenna close to a known
position (by eye). Enter the position at the bottom and click the
'Set Current' button. Now the calibration will be close and the
next time a Z-Pulse is detected the calibration will be adjusted to be
exactly correct.
Note, Some US Digital Incremental encoders have been discontinued.
Their Web Pages indicate that they no longer make the T5 or T6
incremental inclinometers. So the only choice we currently have is
to go with the Absolute encoder for an inclinometer, but that is much
more expensive. Perhaps there are still old stock T5 or T6
inclinometers available, or someone has some to sell.
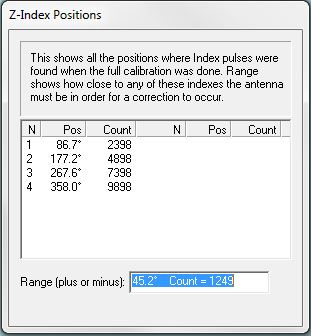
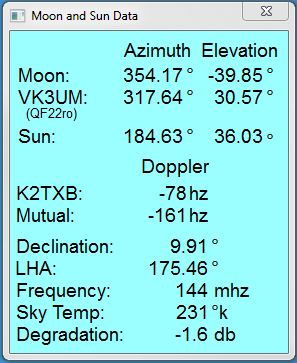
After
calibrating the antenna with Z-Indexes, and whenever entering the
incremental calibrate dialog when a Z-Index calibration has already been
done, a second dialog box will be shown along side of the calibrate
dialog shown above. This box shows the results of the Z-Index
counting and is shown to the left.
Note the Range at the bottom that is shown both in degrees and count.
This is how close to the actual position your antenna must be in order
to get an accurate Z-Reset operation. If the antenna position
error is greater than this amount then the wrong Z-Index will be used
and the calibration will be off by one or more rotations of the encoder.
Remember, this is all automatic and each time a Z-Pulse is detected
the controller will adjust it's calibration if necessary. Thus any
minor errors that might creep into the count are automatically accounted
for. The greater the gearing (up to 16:1), the more often the
calibration will be checked and adjusted. However with higher
gearing, the amount of antenna error that can be tolerated when making a
Z-Index adjust is reduced.
Incremental 360 Calibration
 The
Incremental 360 encoder type was implemented to handle the Slew Drive as
implemented by W2HRO. However it can be used any time there is a 1
to 1 gearing between the encoder and the antenna (the encoder is driven
a full and exact 360 degrees for a full revolution of the antenna).
So, as long as you have 1:1 gearing and know the pulse count per
revolution, you can use this 360 type and have significantly easier
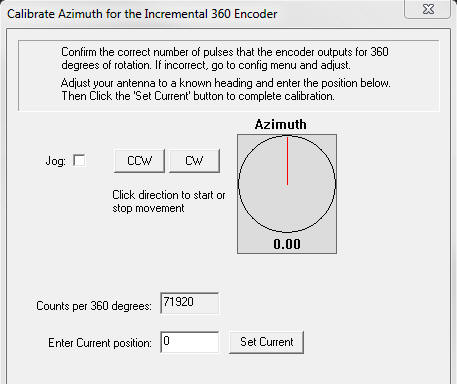
calibration. The
Incremental 360 encoder type was implemented to handle the Slew Drive as
implemented by W2HRO. However it can be used any time there is a 1
to 1 gearing between the encoder and the antenna (the encoder is driven
a full and exact 360 degrees for a full revolution of the antenna).
So, as long as you have 1:1 gearing and know the pulse count per
revolution, you can use this 360 type and have significantly easier
calibration. Here there are only 2 operations. You can adjust
the antenna position using the CCW and CW buttons (or Up / Down) for
elevation drives. And you can enter and set the current position.
This depends on having already configured the controller with the
correct pulse count for the encoder you have. The pulse count is
shown here just so you can see if it looks correct, but it must be set
via the Configuration window in DrzTrack. If your drive moves too fast
for easy adjustment, you can check the Jog box. This will cause
the antenna to move in short pulses, with a delay between each one.
This will not work unless jogging has been enabled and set up in the
encoder configuration screen. |
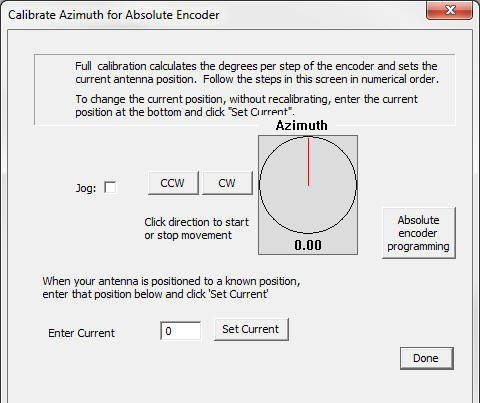 Absolute
encoders have some special calibration considerations. Absolute encoders
output an absolute position count from zero to 360 degrees, for one turn
of the encoder shaft. To calibrate them it is only necessary to
set the current position. It is not necessary to do min and max
setting.
Absolute
encoders have some special calibration considerations. Absolute encoders
output an absolute position count from zero to 360 degrees, for one turn
of the encoder shaft. To calibrate them it is only necessary to
set the current position. It is not necessary to do min and max
setting.